Two dimensional spirals
... also known as equiangular spirals, Bernoulli spirals,
proportional spirals, geometrical spirals, spira mirabilis.
A brief history and definitions
|
In a letter dated 12th of september
1638 and addressed to
Mersenne, Descartes wrote: ... for this spiral, it has
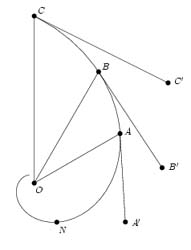
several properties which makes it quite recognizable. Because if
O is the centre of the earth and that ONABC is the spiral,
having traced straight lines OA, OB, OC and similar, there is
the same proportion between the curve ONA and the line OA than
between the curve ONAB and the line OB, or ONABC and OC, and
so on for the remaining. Furthermore, if one traces the tangents
AA˘, BB˘,
CC˘ etc., the angles OAA˘, OBB˘, OCC˘ etc. will be equal.
This paragraph is considered as the one giving birth to the
logarithmic spiral. It reveals its many mathematical aspects, and
these have all yielded different names attributed to it. The
fundamental property of the spiral is that the angle between an
arbitrary tangent to the curve at a point P and the corresponding
radius vector OP is constant. Therefore, René Descartes called it
the equiangular spiral.
|
|

Figure 2.1: Photo of Bernoulli's tomb. Try to find the
mistake made by the sculptor...
|
A few decenies later, namely in 1691 in Acta eruditorum,
Jacob Bernoulli called it the logarithmic spiral because
the vector angle about the pole is proportional to the logartihm of
the corresponding radius. He eventually became so fascinated by this
curve that he had it engraved on his tomb (cf. figure 2.1), followed by the phrase "Eadem mutata
resurgo", meaning "I shall arise the same, though changed". Soon,
the reader will understand the mysterious meaning of that phrase, and
how it is related to this specific curve. He also called it spira
mirabilis, which means "admirable spiral". He was truly amazed.
|
In Descartes' above description, it is mentioned that there
are similarities in proportions, which in 1696 led Edmund Halley in
Philosophical Transactions to call it the
proportional spiral, noting that The
lengths of segments cut off from a radius vector between successive
whorls of the spiral form a geometric progression.
The last most known name for the spiral is due to P. Nicolas, who
called it the geometric spiral (De Novis Spiralibus,
1693), and was based on a similar observation to Halley's.
Long before the logarithmic spiral was discovered, Archimedes
(287-212 BC) in On Spirals introduced another spiral, named
after him: the Archimedean spiral. It is not to be
mistaken for a logarithmic spiral. Indeed, most of the interesting
properties of the logarithmic spiral, which we shall study in the
following, are not present in an archimedean spiral.
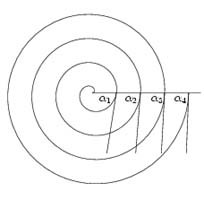
Figure 2.2: An archimedean spiral with a few of its
tangents. Compare this shape with the one on the photo from the
previous page.
|
The archimedean spiral is the trajectory of a point P moving
uniformely away from a point O (the pole) and meanwhile rotating
uniformly around this pole. Thus, there is a linear relation between
the radius OP, denoted r, and the angle of rotation, q, and the archimedean spiral with pole at the
origin of a polar coordinate system is therefore given by the equation
r = aq, a being a characteristic constant
of the spiral. So, using Halley's formulation, the lengths of
segments cut off from a radius vector between
successive whorls of the spiral are all equal. And it is exactly
the fact that they are equal - hence do not progress - that
distinguishes it from the logarithmic spiral, which we will see
is the mathematical expression of growth. Furthermore, the angle a between a radius vector at a given point
and the tangent to the curve at this point is given by the
relation
|
tana = |
r dq
dr
|
= |
r
a
|
= q, |
|
which shows that a continuously tends to p/2 as q goes
to infinity (cf. figure 2.2). This being said, we now
turn our interest exclusively towards the logarithmic
spirals.
|
The diversity in the names attributed to the curve reveals
that we are dealing with a curve having many aspects. This is in
particular visible in the various ways of defining the logarithmic
spiral. Using the same physical model as when we defined the
archimedean spiral, we get: the curve which is the trajectory of a
point P moving away from a point O (the pole) with a velocity
proportional to the distance from O, and meanwhile rotating
uniformly around O, is called a logarithmic spiral. Hence,
there is an exponential relation between r and q (as they were
defined above), and we may therefore define the curve by the equation,
in polar coordinates:
where a Î R+* and b Î R are characteristic
constants of the spiral. Using this equation, the above mentioned
properties (yielding the different names), are easily shown. In fact,
let a denote the angle between the tangent and the radius at a
given point on the spiral. As for the archimedean spiral, we have the
relation
|
tana = |
r dq
dr
|
= |
1
b
|
Ţb = cot a. |
|
Since b is constant, the angle a also is, and thereby we join Descartes'
formulation. Bernoulli's formulation is trivially shown by taking the
natural logarithm on both sides of the equations, revealing a linear
relation between the angle q and the
logarithm of the radius r, from where the name originates. In section
2.4, we will also make a
demonstration of Halley's observation.
|
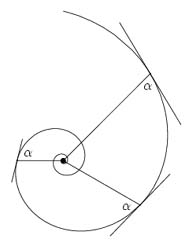 Figure 2.3: A logarithmic spiral with a few of its
tangents. Click on the picture to go to the constant angle
demo-applet.
Figure 2.3: A logarithmic spiral with a few of its
tangents. Click on the picture to go to the constant angle
demo-applet.
|
Another definition, less mathematical, built on the fact that the
characteristic angle is constant is the following: let four bugs,
called b1, b2, b3 and b4,
be placed in each corner of a square. Each bug is walking with uniform
velocity towards the neighboring bug, i.e. b1 walks towards
b2, b2 towards b3, b3
towards b4, and b4 towards b1. Their
respective path is a logarithmic spiral, or more eloquent, an
equiangular spiral. In fact, by symmetry,
b1b2b3b4 will always be a
square with centre O - the center of the initial square - and each
side corresponds to the direction of the velocity vector of each
bug. More precisely, [( ®) || (
b1b2)] is the instantaneous velocity vector of
b1 and so on. But this velocity vector is, per definition,
the instantaneous tangent to the bug's path - say b1 - and
thus, this tangent forms a constant angle, p/4, with the radius vector [( ®) || (
Ob1)] (cf. figure 2.4).
Thus, we have obtained a logarithmic spiral with characteristic angle
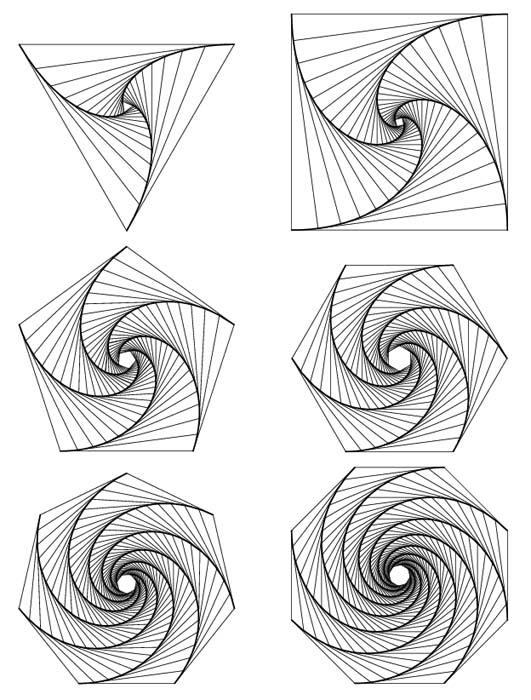
p/4. Of course, one may consider an arbitrary number n > 2 of
bugs walking towards their respective neighbor, and thereby obtain a
logarithmic spiral with characteristic angle p(n-2)/(2n) radians,
which is half the angle of the polygon corner. This yields some
beautiful figures shown on figure 2.5.
|
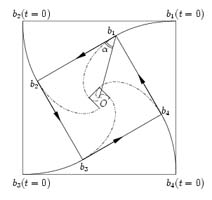 Figure 2.4: Four bugs walking towards each other with constant
velocity. Click on the image to watch an animation of the bugs
displacement.
Figure 2.4: Four bugs walking towards each other with constant
velocity. Click on the image to watch an animation of the bugs
displacement.
|
Figure 2.5: Different configurations of bugs moving towards each
other in the way described above.
A third definition is built on Halley's and Nicolas'
observations of geometrical progression in the radius vector length.
In fact, whereas the archimedean spiral can be seen as a coiled
cylinder (for example a rope on a boat deck), the logarithmic spiral
can be pictured as a cone coiled upon
itself, as D'Arcy Thompson writes
in [23], p. 176.
Curves derived from the logarithmic spiral
|
To any two-dimensional curve, there is associated a series of curves
such as the evolute, the envelope, the catacaustic, the pedal or the
radial curve, which are obtained by some well-known transformations
common to all curves. We will only present four of these here, but
there are, of course, many others. A good introduction to such special
curves can be found in [16].
The evolute is the locus of centers of the circles of
curvature. Roughly speaking, in the two-dimensional case,
curvature is the amount by which a curve deviates from a straight
line. Correspondingly, the circle of curvature of a curve C, at a
given point P, is the best approximation of the curve in a
neighborhood of P, and the center O of this circle is, as
physicists would say, the instantaneous center of rotation. See
also [17]
for more details about curvature. The
catacaustic is obtained in the following way: consider a
light source, projecting rays towards the considered curve. Each ray
will of course travel a certain distance d to reach the curve, and
thereafter be reflected in it. The locus of the points obtained by
proceeding along the reflection in a distance d will form the
catacaustic of the curve. The pedal of C is the locus of
the intersection points between the perpendicular from a given point
O to the tangents of C. The radial curve of C can be
constructed as follows: to a point P on C, there corresponds a
point Q which is the center of the circle of curvature at P. The
radial curve of C with respect to a point O is the locus of the
points obtained by translating O of vector QP.
|
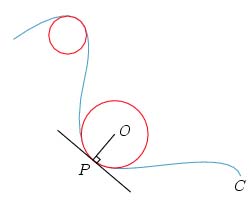 Figure 2.7: Circles of curvature.
Figure 2.7: Circles of curvature.
|
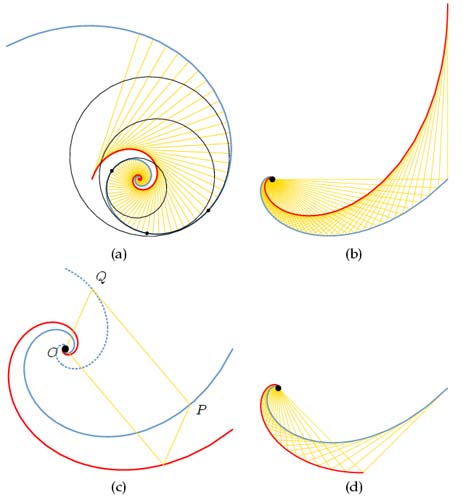
Figure 2.8: The logarithmic spiral (solid blue) and some of its
derivatives (solid red): (a) the evolue, some of the circles of
curvature and radiis of curvature (yellow lines); (b) the
catacaustic, with some rays, originating, in this case, from the
pole of the spiral; (c) the radial curve, in this case with
respect to the pole, too. For illustrational purpose, the spiral's
evolute has also been included (blue dashed line); (d) the pedal,
with respect to the pole. Click on the image to go to the
"Logarithmic spiral derivatives" applet, where you can expenriment
with different curves derived from the logarithmic spiral.
It is interesting to remark that all
theses curves, when derived from the logarithmic spiral, are,
themselves, spirals of the same class, as depicted on figures 2.8. Of course, some curves might
not be spirals at all, such as the negative pedal or the
parallel. However, when the derived curve is a logarithmic
spiral, it will, always, be one of the same class. The reason can be
informally described as follows: all parts of the logarithmic spiral
are similar to each other, in the sense that all of these can be
mapped onto each other by rotation or scaling - in contradiction to,
for instance, the square, where a piece containing a corner is not
similar to one containing no corner. A more picturesque description is
the following: no matter where you stand on the curve, what is behind
you and in front of you is always the same, perhaps just at a
different scale, which is also partially due to the fact that the
logarithmic spiral is an unending curve at both ends. Therefore, the
image of an arbitrary point on the spiral, through one of the mappings
used to obtain a derived curve, should be similar to the image of
another point on the spiral. Had a derived curve been a logarithmic
spiral which was not of the same class, the original curve and the
derived one would have an infinity of intersection points, according
to Theorem 2.3.1. Thus, there
would be one point whose image lies on the original spiral (an
intersection point between the two curves), and another point whose
image does not lie on it, contradicting our presumption of similarity
in the images. Hence, if the derived curve is a logarithmic spiral, it
must be of the same class. And this is why Bernoulli talked about the
arise of a new curve, for instance the evolute, which is actually
similar to the original one.
An unending curve of finite length
Another remarkable property of the logarithmic spiral is that when
starting at a point on it, the distance needed to reach the pole,
moving along the spiral, is finite, despite that the curve has no
endpoint. We will now show that.
Consider a spiral s with polar
equation r = a e θ cot α. To every value
of q Î Â corresponds a radius r > 0. Thus, if we
stand somewhere on the spiral, we will be able to move inwards or
outwards along the curve, infinitely. In this sense, the curve has no
end point.
Now, imagine the spiral "rolling out"
along a straight line L - the ground one could say - as depicted on
figure 2.9. Since P Î s ÇL is the
instantaneous rotation centre of O, O being the pole of s, the angle
Ð(POQ) is right. Furthermore, a = Ð(OPQ) is
constant through the movement, so the pole will move in a fixed
direction, perpendicular to OP. Since a
< p/2, OQ intersects with the ground,
and thus the curve length PQ is given by Pythagores' theorem, namely
OP seca.
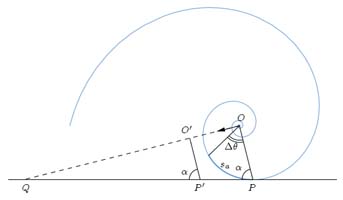 Figure 2.9: Spiral rolling along a straight line (without slipping).
This property of an unending curve having finite length is
similar the paradox of Achilles and the Tortoise. In this case, we do
not divide the real line segment [0,1] into segments of length
1/2, 1/4, 1/8 etc., but divide the spiral into arcs by
successive units of angle Dq
= 1. If the first piece has
length l, the following (moving inwards), will have lengths le-cota, le-2 cota, etc., as will be shown
in the next paragraph. Summing up, the length to the pole is the the
limit of the series
Figure 2.9: Spiral rolling along a straight line (without slipping).
This property of an unending curve having finite length is
similar the paradox of Achilles and the Tortoise. In this case, we do
not divide the real line segment [0,1] into segments of length
1/2, 1/4, 1/8 etc., but divide the spiral into arcs by
successive units of angle Dq
= 1. If the first piece has
length l, the following (moving inwards), will have lengths le-cota, le-2 cota, etc., as will be shown
in the next paragraph. Summing up, the length to the pole is the the
limit of the series
|
l+ le-cota + le-2 cota + Ľ |
|
Since a Î ]0,p/ 2[, cota > 0 and
hence e-cota < 1, so the series is convergent, with a
well-defined value. From a topological point of view, one can see the
pole as a supremum for the set of points that generate the spiral, in
the same way that 1 is the supremum for the series ĺn=1Ą1/2n used in Achilles' paradox.
Arc length
The above mentioned construction also makes it possible to easily
determine the arc length of a logarithmic spiral.
Let sa be an arc of s delimited by two radiis forming an
angle Dq,
i.e. an arc of s starting at r(q-Dq) and ending at r(q). We place the spiral such that it touches the ground at r(q). Then we roll it out by an angle Dq, and thus the
spiral touches the ground at r(q- Dq). The seeked curve length is therefore the
length between the two contact points between the spiral and the
ground at r(q) and r(q-Dq). But since OP
and O˘P˘ are
collinear (forming the same angle a with
the ground), and that we know the total distance PQ, a simple
application of Thales' theorem gives the arc length:
|
|
PQ-PP˘
PQ
|
= |
r(q-Dq)
r(q)
|
= e-Dq
Ţ PP˘ = (1 - e-Dq)
r(q)seca. |
|
It is funny to mention that if we had used the classical way of
finding a curve length using integrals, we would have a lot of trouble
since these a very hard, if not impossible, to find. Jacob Bernoulli
did that in 1679 and encountered so-called elliptic integrals!
The spiral is a gnomon
In "On Growth and Form" [23], D'Arcy Thompson
writes:
"It is characteristic of the growth of the horn, of the
shell, and of all other organic forms in which an equiangular
spiral can be recognized, that each successive increment of growth
is similar, and similarly magnified, and similarly situated to its
predecessor, and is in consequence a gnomon to the entire
pre-existing structure."
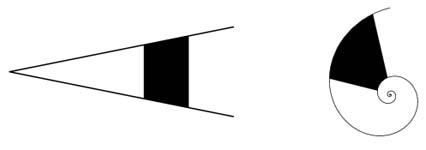
On the right graph of figure 2.15, we have
shown the section in question, delimited by two radiis. These radiis
are mapped, through T, onto vertical lines in L, creating a
trapezium. And such a section is a gnomon to the rest of the triangle.
Since the isoceles triangle in L can be considered as a spiral
where only rotation has been discarded, is is clear that this
trapezium represents a gnomon to the spiral.
Figure 2.15: Mapping between similar shapes (gnomons).
Concluding remarks
With the above described theory of logarithmic spirals as a
background, we are ready to move towards more interesting domains in
which it come to expression, namely the seashells and the plant
patterns.
Continue to the spiral patterns in
seashells and horns.