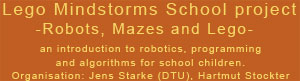
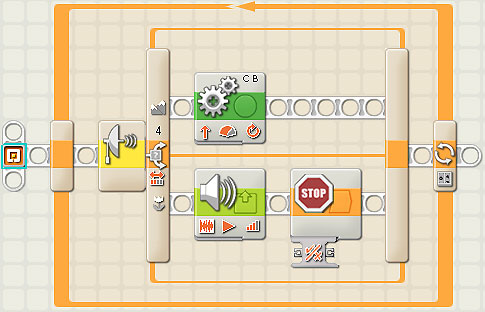
| Program examples |
The robot drives untill it encounters an obstacle and makes
a sound.
 |
The robot again drives untill it encounters an obstacle and
then sounds an alarm. When it detects a
substantial change in lightness of the ground, it makes a different
sound and stops.
 |
Following a white line on dark ground -
zigzag movements of robot to follow the edge of the white line.
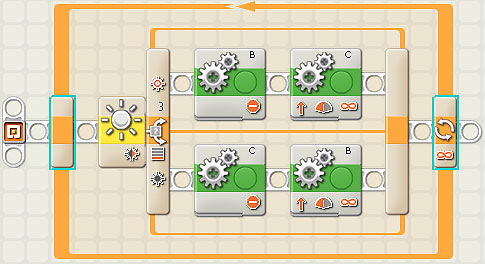 |
Following a line using a light-sensor that is attached to
a constantly swaying arm, in order to avoid zigzag-movements
while following the line.
 |
| |