| Programeksempler |
Robotten kører indtil den møder en forhindring. Så giver
den en lyd fra sig og stopper.
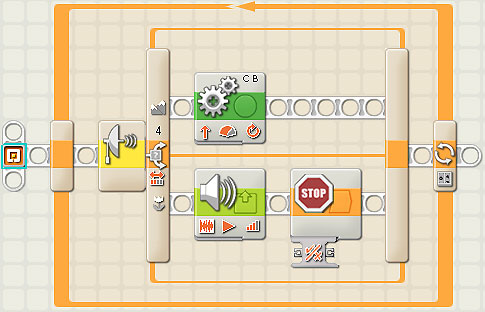 |
Igen kører robotten indtil den møder en forhindring,
giver så en lyd fra sig og stopper. Hvis dens lyssensor
registrerer en betragteligt lysere undergrund, giver robotten
en anden lyd fra sig og stopper.

|
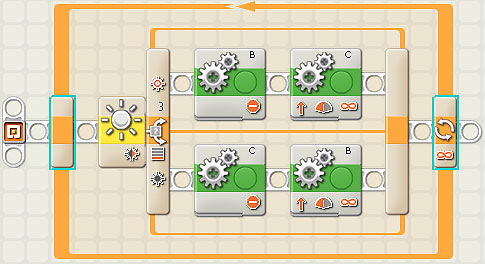
Robotten kører i zigzagkurs på kanten af
en hvid linje på mørk undergrund.
 |
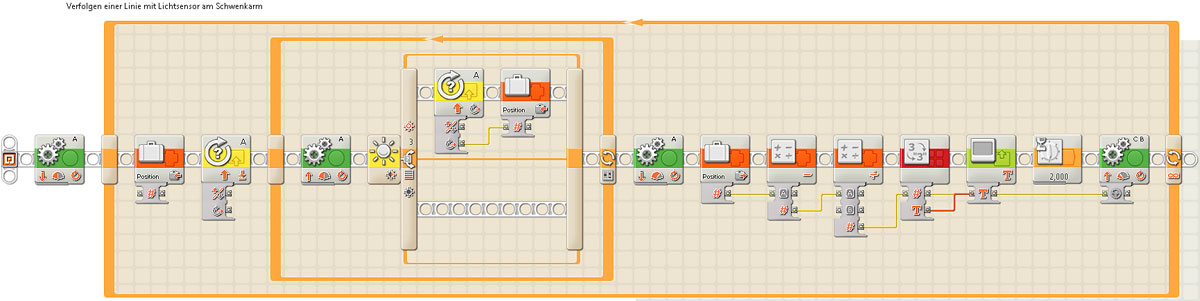
Robotten følger en hvid linje. Denne gang er
dens lyssensor monteret på en arm som konstant bevæger
sig over linjen.
 |
| |
